AP-202 is industrial and professional flight control and navigation system, which integrates higher precision sensors based on AP-201 and adopt rugged structure and more peripheral interfaces for customization application requirement.
▶Adopt tactical precision MEMS IMU, featuring strong anti-disturbance, high stability and high accuracy of UAV attitude control.
▶Integrate high accuracy RTK GPS module from Novatel, featuring centimeter level accuracy of UAV positioning.
▶Support multiple takeoff mode of UAV, such as full auto running takeoff, full auto takeoff on moving platform or ship, cartop auto launching and rocket launching.
▶Support multiple recovery mode of UAV, such as full auto running landing, parachute recovery, net recovery and high precision skyhook recovery,etc.
▶With adaptive control algorithm based on total energy, the normal configuration UAVs are ready to fly without parameters adjustments once autopilot installed.
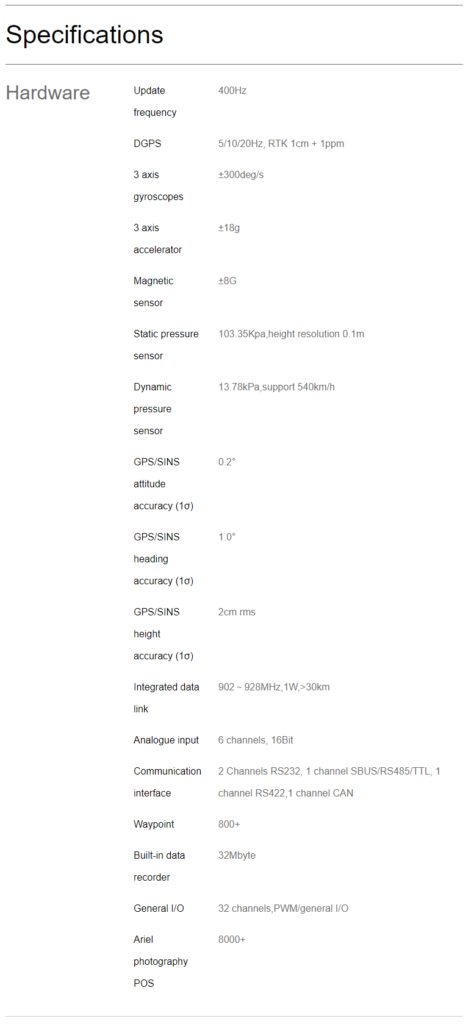
▶Nonlinear high-accuracy GPS/SINS/AHRS fusion algorithm features the update frequency of 200Hz (max. up to 400Hz), automatic switching to AHRS mode smoothly to ensure flight safety in case of GPS loss. The positioning accuracy in the AHRS mode is less than 1Km if GPS lost more than 10 minutes.
▶Support customization fail-safe mechanisms request from end user, existing fail-safe mechanism are auto return by lower power, GPS lost, datalink timeout, RC command timeout, over limitation of altitude.
▶Built-in 32Mbyte data recorder for 4-8 h flight logging data recording.
▶Built-in 1W FHSS telemetry radio module with communication range up to 90km.
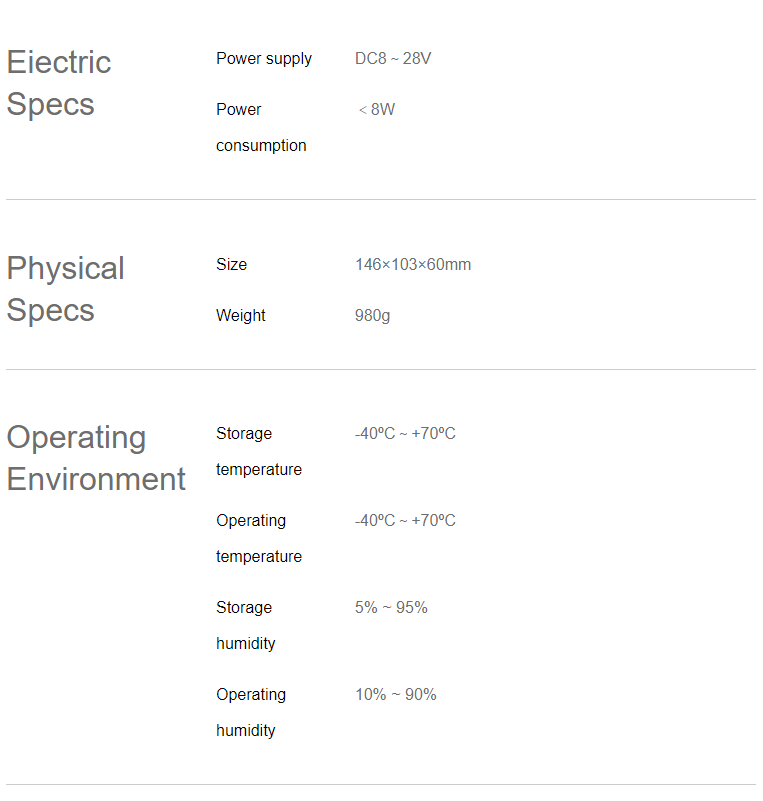
▶Temperature compensation for all sensors within -40 ºC ~+85 ºC.
▶ Modular design embedded OS and MPC 5200 processor from Freescale, which make the autopilot secondary development availability based on its abundant CPU resources and data processing platform.Variable frame packet communication protocol and standard communication protocol SDK are available for the ground control station application secondary development application.
Support hardware-in-the-loop simulation based on the standard communication protocol.
*Actual product features and specifications (including but not limited to appearance, colour, and size), as well as actual display contents (including but not limited to backgrounds, interface, and icons) may vary by country
**All performance data in the foregoing pages are theoretical values obtained by FineVT Robotics LAB internal laboratories through tests carried out under particular conditions. For more information on the specific testing conditions, refer to the aforementioned product details. Actual performance may vary owing to differences in individual product configuration, software versions, application conditions, and environmental factors. All data is subject to actual usage.
***FineVT Robotics LAB makes every effort at the time of publication to ensure the accuracy of product information it provides. Due to subsequent changes involving product batches, production and supply factors, it may be necessary for FineVT Robotics LABto make changes and adjustments to text and images so that they match the performance, specifications, indexes, and components of the actual product. Product information is subject to such changes and adjustments without notice.
Any illegal utilization is forbidden as FineVT Robotics LAB® series autopilots are sensitive items. FineVT Robotics LAB will not take any responsibility for any consequences caused by illegal use, nor provide any technical support or promise for any obtaining through irregular channels. We shall not be related to any third party liability by using the products.The direct or indirect application of FineVT Robotics LAB ® FFW series autopilots and products will be considered as unconditional acceptance of this statement. If you have any dissent of any clauses, please immediately suspend the usage.