Triple Redundant arrangement full function and aviation grade flight control and navigation system, especially application for the higher reliability requirement of sensitive flight mission or highly valuable payloads.
▶Integration three autopilot systems for triple redundancy. If any one of the three systems fail, the remaining two take over flight control and navigation as double redundant arrangement.
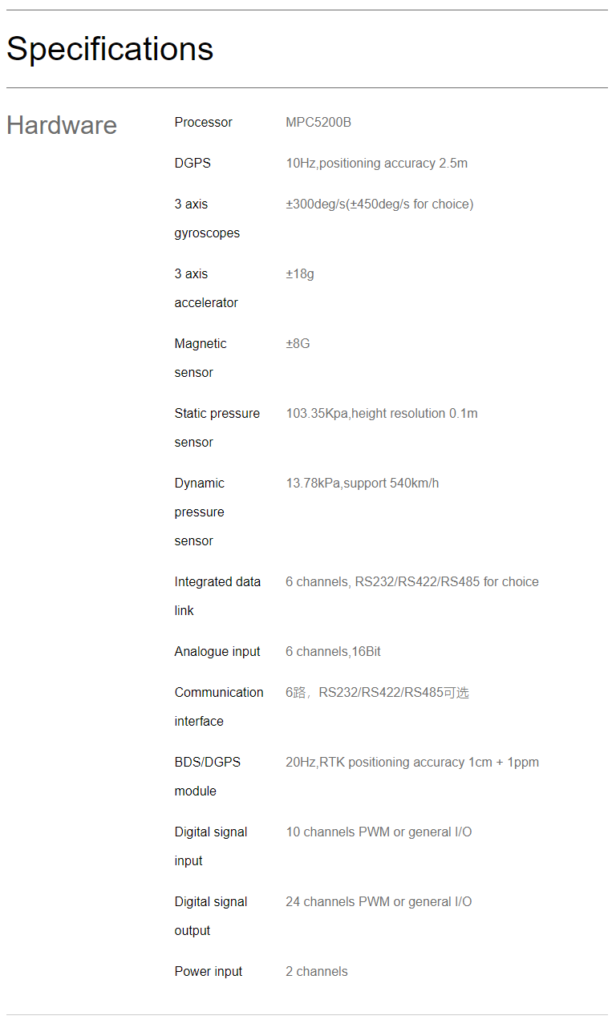
▶Each autopilot unit is composed of processor, IMU, static/dynamic pressure sensor, magnetic sensor and GPS/ BeiDou module.
▶Each autopilot features independent positioning process, redundant management, fault detection and isolation and refactoring.
▶Feature three channel positioning control analysis, and real time sharing of three channels sensors data, parameters and output command.
▶Integrate high accuracy RTK BeiDou/GPS module, featuring centimeter level accuracy of UAV positioning.
▶Support additional higher performance IMU sensor, navigation devices, vertical gyroscope, magnetic heading sensor.Optional additional two wireless data communication port for data transmission redundancy.
▶Built-in 96 Mbyte data recorder for 20h flight logging data recording.
▶ Modular design embedded OS and MPC 5200 processor from Freescale, which make the autopilot secondary development availability based on its abundant CPU resources and data processing platform.Variable frame packet communication protocol and standard communication protocol SDK are available for the ground control station application secondary development application.
Support hardware-in-the-loop simulation based on the standard communication protocol.
*Actual product features and specifications (including but not limited to appearance, colour, and size), as well as actual display contents (including but not limited to backgrounds, interface, and icons) may vary by country
**All performance data in the foregoing pages are theoretical values obtained by FineVT Robotics LAB internal laboratories through tests carried out under particular conditions. For more information on the specific testing conditions, refer to the aforementioned product details. Actual performance may vary owing to differences in individual product configuration, software versions, application conditions, and environmental factors. All data is subject to actual usage.
***FineVT Robotics LAB makes every effort at the time of publication to ensure the accuracy of product information it provides. Due to subsequent changes involving product batches, production and supply factors, it may be necessary for FineVT Robotics LABto make changes and adjustments to text and images so that they match the performance, specifications, indexes, and components of the actual product. Product information is subject to such changes and adjustments without notice.
Any illegal utilization is forbidden as FineVT Robotics LAB® series autopilots are sensitive items. FineVT Robotics LAB will not take any responsibility for any consequences caused by illegal use, nor provide any technical support or promise for any obtaining through irregular channels. We shall not be related to any third party liability by using the products.The direct or indirect application of FineVT Robotics LAB ® FFW series autopilots and products will be considered as unconditional acceptance of this statement. If you have any dissent of any clauses, please immediately suspend the usage.